LaTeX templates and examples — Math
Recent

Notes on quadratic functions for Mathematics Standard Level (Hey Mr.Zamar)
this article is mainly to introduce R quant!

Detailed notes
Two examples of extreme-event modeling.
Chapitre 2, Peip2, Polytech'Nice Sophia, sans les sch\'emas et applications sch\'ematis\'ees
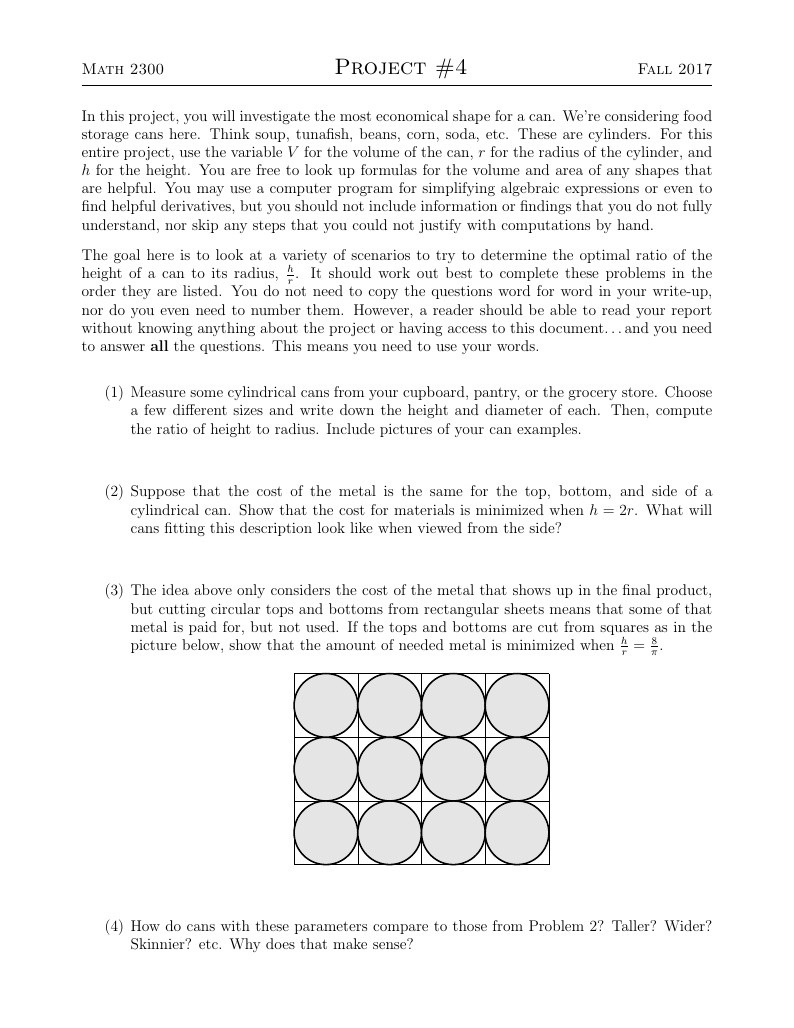
This project for a Calculus I class was adapted from a similar set of problems from the Calculus series by James Stewart.

Ficheiro para registar os resultados das experiências realizadas na disciplina Seminário II - módulo funções em 2019/20
laborario 3 de calculo vectorial
A second project for Calculus 1 at Fitchburg State. Explore the proofs of some of the derivative rules and derive new rules from old.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.